 EN
EN


Attention:
Pay attention to the following precautions about installation, wiring, operation, maintenance and inspection in order to avoid damage to people and property caused by misuse.
1】Please connect the ground wire to the terminal with earthing mark to ensure the servo system is firmly grounded;
2】Please do not replace the motor, wire or touch the wiring terminals within 5 minutes after turning off the power, otherwise there is a risk of electric shock;
3】Please do not touch the heat sink, motor, and braking resistor during operation to avoid burns;
4】Please do set over-current protection device, residual current circuit breaker and emergency stop device, and confirm their effectiveness before operation;
5】Please set an external emergency stop circuit to ensure that the operation can be stopped in time and the power supply can be cut off in an emergency;
6】Please run the servo motor with no load first to avoid accidents before trial run;
7】Please do not turn on/off the servo driver power frequently;
8】It is strictly forbidden to perform installation, wiring and other operations under power-on conditions;
9】Please do not connect the motor wire terminal to the main supply;
10】Please do not disassemble, modify or repair the servo motor driver by yourself;
11】Please turn off the driver’s power supply when if it occurs error;
12】The power must be off if it is not used for a long time.
Storage Environment:
This product must be placed in the packaging box before installation. If it is not used temporarily, please pay attention to the following items when storing
in order to make the product comply with our company's protection scope and future maintenance:
in order to make the product comply with our company's protection scope and future maintenance:
● The environment temperature of the storage location must be within the range of -20°C to +80°C;
● The relative humidity of the storage location must be within the range of 0% to 90% without condensation;
● Avoid storage in an environment containing corrosive gas or liquid.
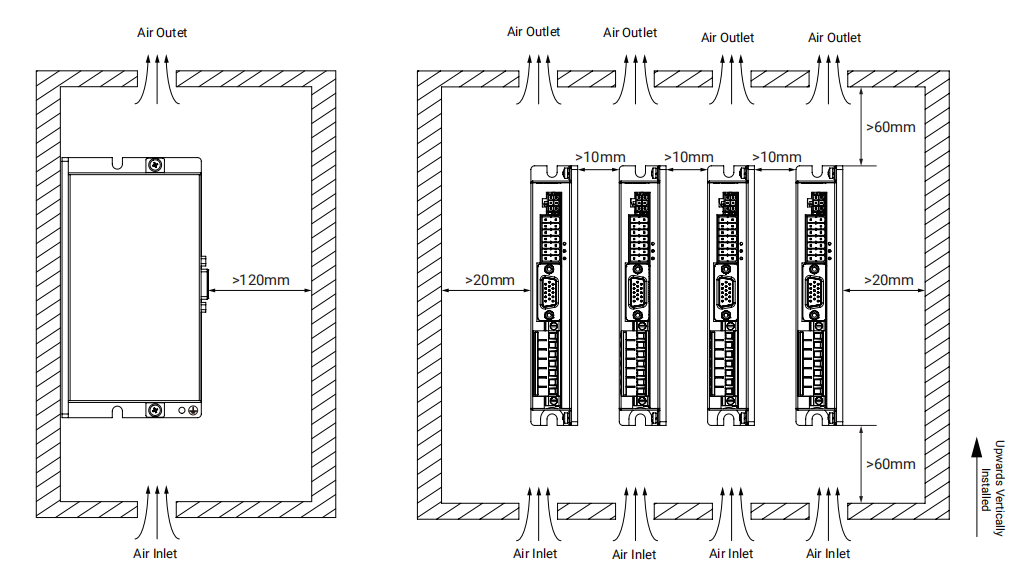
Installation Environment:
● The working environment temperature of the servo unit: 0~45℃;
● Humidity: below 90%RH (relative humidity);
● Vibration: 4.9m/s², applicable altitude: lower than 1000m, lower power is necessary if higher than 1000m;
● To avoid freezing or condensation
● Please use it under environmental temperature below 45°C to ensure the reliability of long-term use.
● The working environment temperature of the servo unit: 0~45℃;
● Humidity: below 90%RH (relative humidity);
● Vibration: 4.9m/s², applicable altitude: lower than 1000m, lower power is necessary if higher than 1000m;
● To avoid freezing or condensation
● Please use it under environmental temperature below 45°C to ensure the reliability of long-term use.
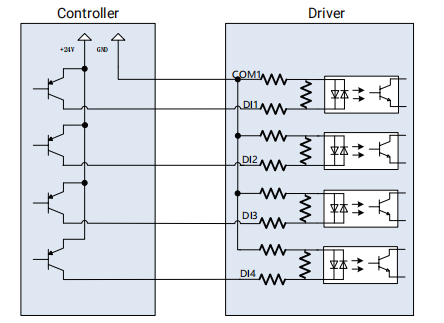
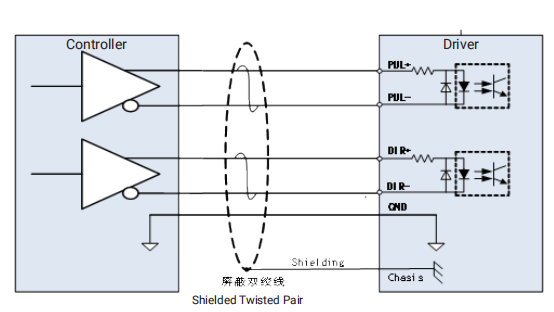
 Note: If a 24V pulse signal is connected, a 2K resistor must be connected to the pulse signal line, and the power must be higher than 0.5W.
Note: If a 24V pulse signal is connected, a 2K resistor must be connected to the pulse signal line, and the power must be higher than 0.5W.











.jpg?imageView2/2/w/370/h/370/format/jpg/q/75)





